I'm Hong Huang, a first-year Ph.D. student in DeLTA Lab at Simon Fraser University, advised by Prof. Wuyang Chen. Previously, I worked closely with IEEE Fellow Prof. Yefeng Zheng, and I received my B.S. with honors in Computer Science from Shandong University in 2024.
If you have any shared research interests or topics you'd like to chat about, please feel free to email me. I am always happy to explore potential collaborations and engage in insightful conversations.
Research Overview
My research interests include:
- World Models: Physics-informed world models and simulators. I aim to develop world models that understand and predict physical dynamics and interactive applications.
- Generative Models: Image and video generation, as well as 3D/4D generation. I am interested in building powerful generative models that capture the visual structure of our world.
News
Selected Publications (view all )
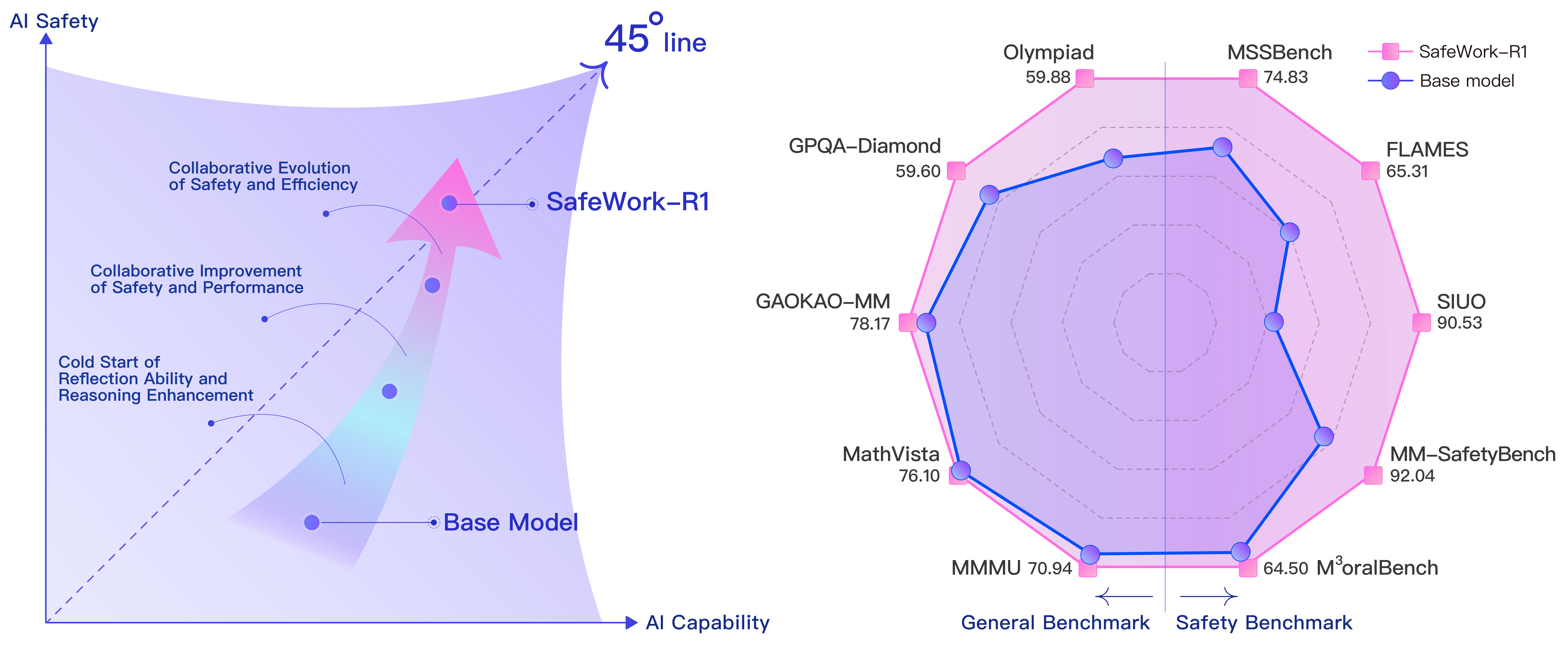
SafeWork-R1: Coevolving Safety and Intelligence under the AI-45° Law
Shanghai AI Lab.
Technical Report 2025
Shanghai AI Lab technical report on coevolving safety and intelligence under the AI-45° Law.
SafeWork-R1: Coevolving Safety and Intelligence under the AI-45° Law
Shanghai AI Lab.
Shanghai AI Lab technical report on coevolving safety and intelligence under the AI-45° Law.
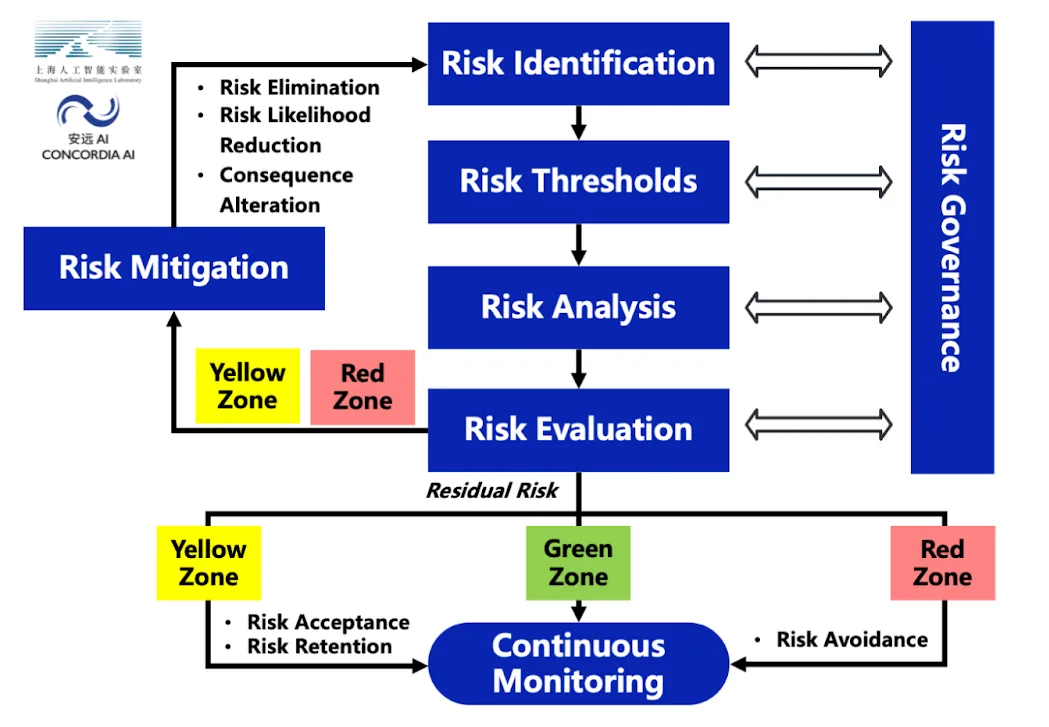
Frontier AI Risk Management Framework in Practice: A Risk Analysis Technical Report
Shanghai AI lab.
Technical Report 2025
Shanghai AI Lab technical report on frontier AI risk management framework in practice.
Frontier AI Risk Management Framework in Practice: A Risk Analysis Technical Report
Shanghai AI lab.
Shanghai AI Lab technical report on frontier AI risk management framework in practice.

Non-Overlap-Aware Egocentric Pose Estimation for Collaborative Perception in Connected Autonomy
Hong Huang; Dongkuan Xu; Hao Zhang; Peng Gao.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 Oral
Non-overlap-aware egocentric pose estimation for collaborative perception in connected autonomy.
Non-Overlap-Aware Egocentric Pose Estimation for Collaborative Perception in Connected Autonomy
Hong Huang; Dongkuan Xu; Hao Zhang; Peng Gao.
Oral
Non-overlap-aware egocentric pose estimation for collaborative perception in connected autonomy.
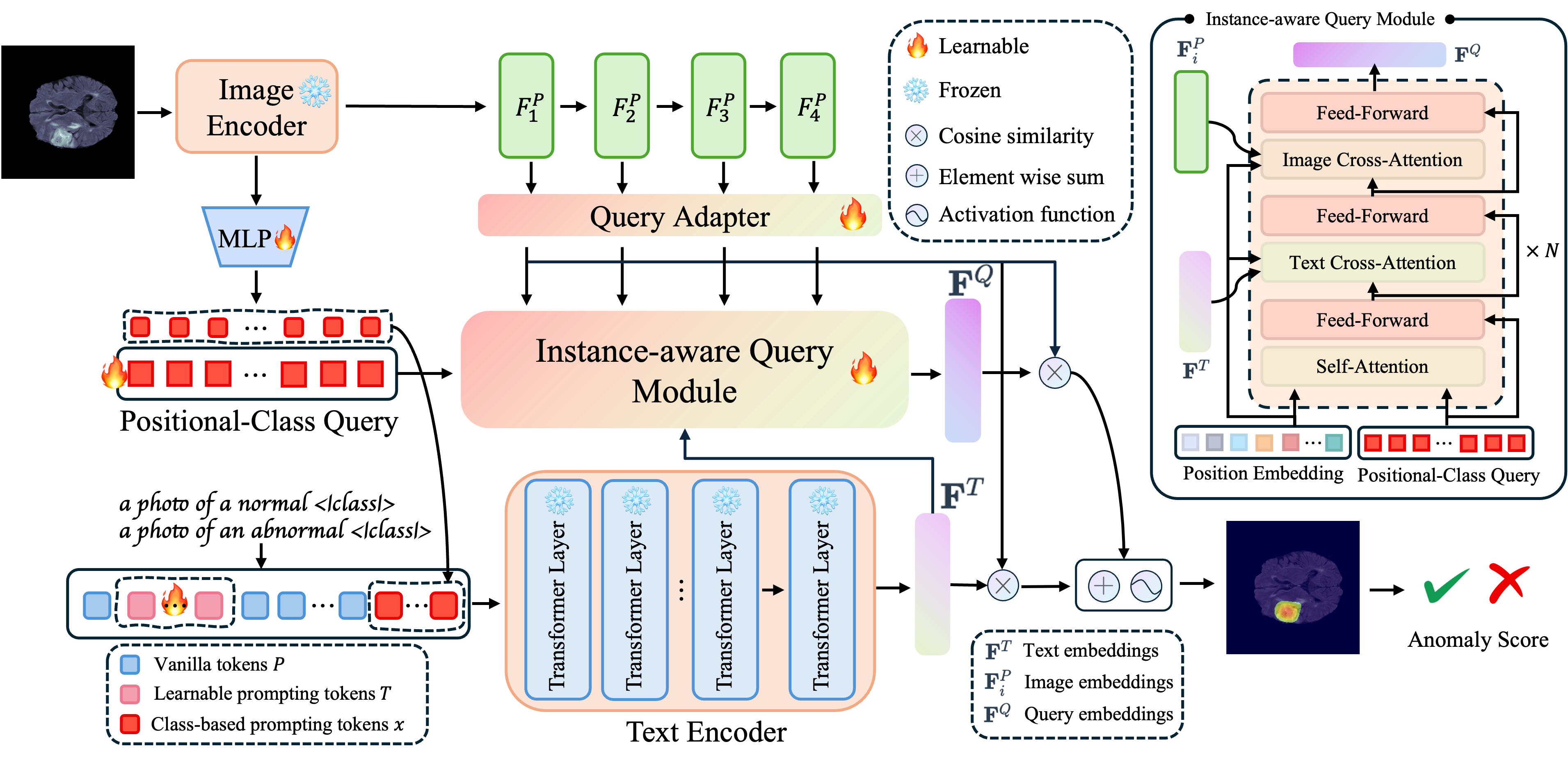
IQE-CLIP: Instance-aware Query Embedding for Zero-/Few-shot Anomaly Detection in Medical Domain
Hong Huang; Weixiang Sun; Zhijian Wu; Donghuan Lu; Xian Wu; Yefeng Zheng.
IEEE Transactions on Image Processing 2026
Instance-aware query embedding for zero-/few-shot anomaly detection in medical domain.
IQE-CLIP: Instance-aware Query Embedding for Zero-/Few-shot Anomaly Detection in Medical Domain
Hong Huang; Weixiang Sun; Zhijian Wu; Donghuan Lu; Xian Wu; Yefeng Zheng.
Instance-aware query embedding for zero-/few-shot anomaly detection in medical domain.
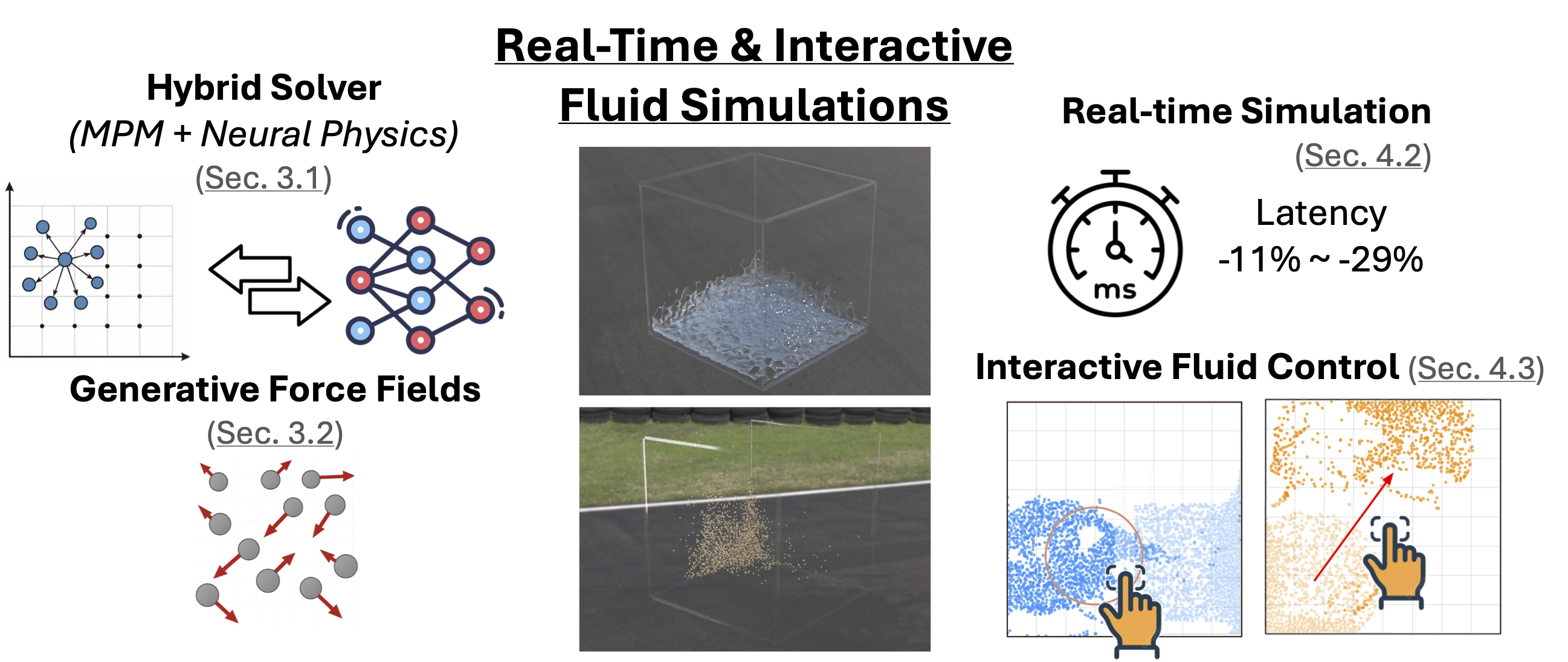
Hybrid Neural-MPM for Interactive Fluid Simulations in Real-Time
Hong Huang*; Jingxuan Xu*; Chuhang Zou; Manolis Savva; Yunchao Wei; Wuyang Chen. (* equal contribution)
ArXiv 2025
Hybrid neural-MPM approach for interactive fluid simulations in real-time.
Hybrid Neural-MPM for Interactive Fluid Simulations in Real-Time
Hong Huang*; Jingxuan Xu*; Chuhang Zou; Manolis Savva; Yunchao Wei; Wuyang Chen. (* equal contribution)
Hybrid neural-MPM approach for interactive fluid simulations in real-time.
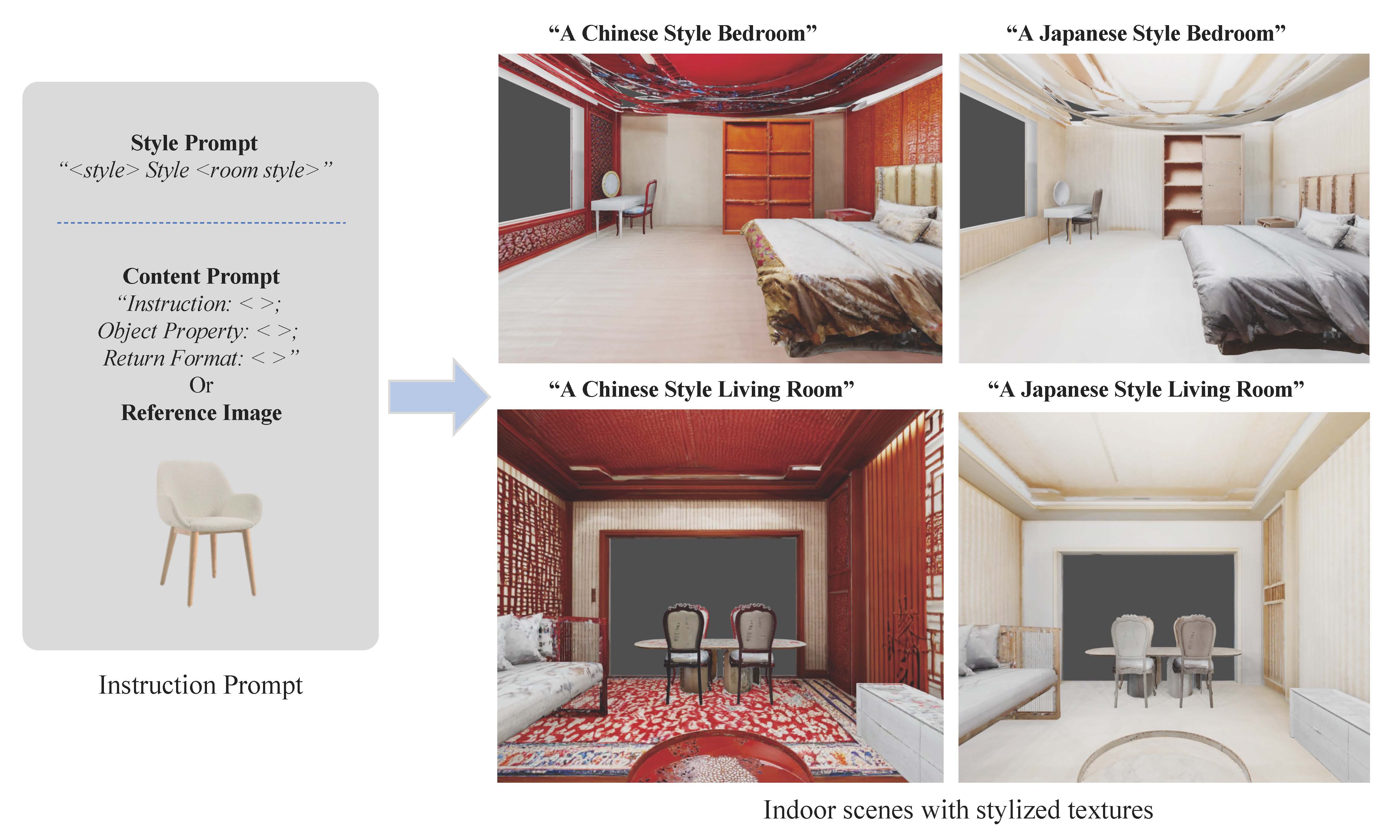
Style-Consistent 3D Indoor Scene Synthesis with Decoupled Objects
Yunfan Zhang; Hong Huang; Zhiwei Xiong; Zhiqi Shen; Guosheng Lin; Hao Wang; Chan Hua Vun.
2025 International Joint Conference on Neural Networks (IJCNN) 2025
Style-consistent 3D indoor scene synthesis with decoupled objects.
Style-Consistent 3D Indoor Scene Synthesis with Decoupled Objects
Yunfan Zhang; Hong Huang; Zhiwei Xiong; Zhiqi Shen; Guosheng Lin; Hao Wang; Chan Hua Vun.
Style-consistent 3D indoor scene synthesis with decoupled objects.
All publications
Experience
-
2026.05 - 2026.09Meta
 Research Scientist Intern (Manager: Yifan Jiang)
Research Scientist Intern (Manager: Yifan Jiang) -
2025.04 - 2025.07Shanghai AI Lab
 Research Intern (Mentor: Dongrui Liu)
Research Intern (Mentor: Dongrui Liu) -
2024.09 - 2025.04Westlake University
 Research Intern (Advisor: Yefeng Zheng)
Research Intern (Advisor: Yefeng Zheng) -
2024.10 - 2025.03North Carolina State University
 Remote Research Intern (Advisor: Peng Gao)
Remote Research Intern (Advisor: Peng Gao)
Education
-
Sep. 2025 - PresentSimon Fraser University
 DeLTA Lab
DeLTA Lab
Ph.D. Student -
Sep. 2020 - Jun. 2024Shandong University
 B.S. in Computer Science (with honors)
B.S. in Computer Science (with honors)
🏆 Honors & Awards
-
BS Honors Student, Shandong University2024.06
-
Outstanding Graduate, Shandong University2024.01